
Conférence – La robotique : Mythes et réalités
Télécharger la présentation de la conférence : La robotique mythe et réalité Plan de la présentation La robotique : une évolution de plus dans l’histoire des sciences ? Entre l’amélioration de l’outil… La robotique : une extension de l’automatisation. … et la...
Robots en IUT – Conférence sur les enjeux de la robotique
Conférence sur les robots et les enjeux de la robotique en IUT : Télécharger la présentation Les robots en IUT GEII La robotique permet la mise en pratique des connaissances et compétences vues en DUT GEII, en les appliquant à la réalisation concrète de robots...
Capteurs et bus terrain en robotique
Ressources pour les capteurs et bus terrains en robotique
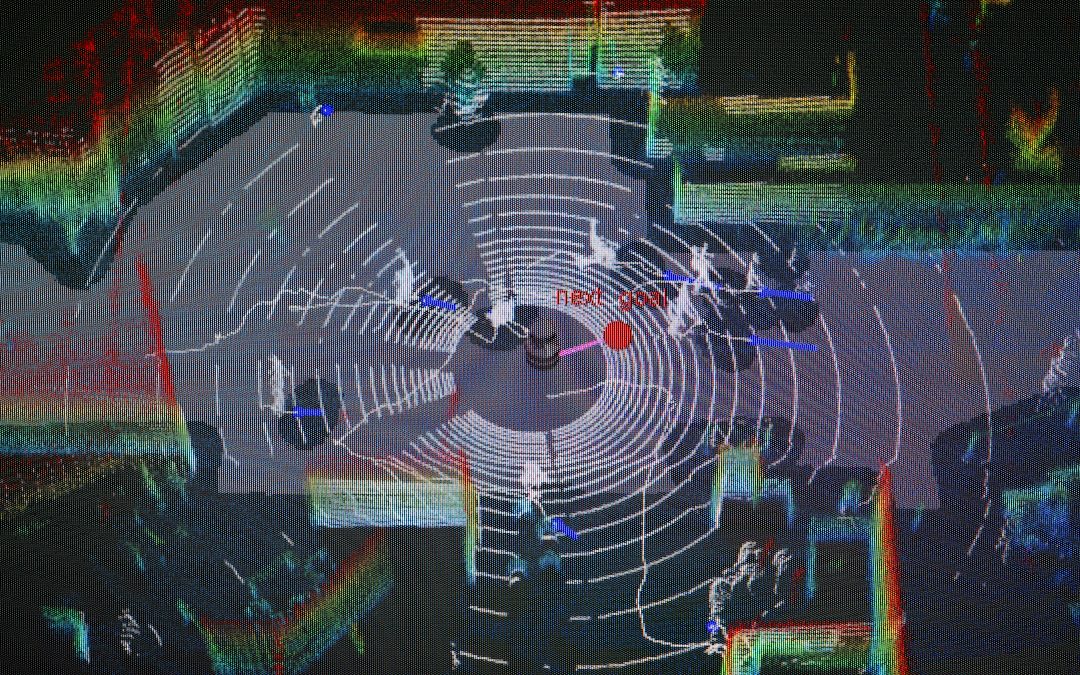
Cartographie et localisation simultanées (Simultaneous Localization And Mapping – SLAM)
Le SLAM (Simulatenous Localization And Mapping) permet à un robot de se localiser dans l’espace et de reconstruire la carte du monde autour de lui. Des ressources permettant de la mettre en oeuvre à coût réduit sur microcontrôleur sont proposées ici afin de mettre en oeuvre cette fonction importante de la robotique.

Odométrie, trajectographie et asservissement PID sur microcontrôleur
L’odométrie, la reconstruction de trajectoire et l’asservissement en vitesse sont trois fonctionnalités importantes en robotique. Les ressources permettant de les mettre en oeuvre dans des microcontrôleurs, sont proposées ici.