Capteurs et bus terrain en robotique
Ressources pour les capteurs et bus terrains en robotique
Ressources pour les capteurs et bus terrains en robotique
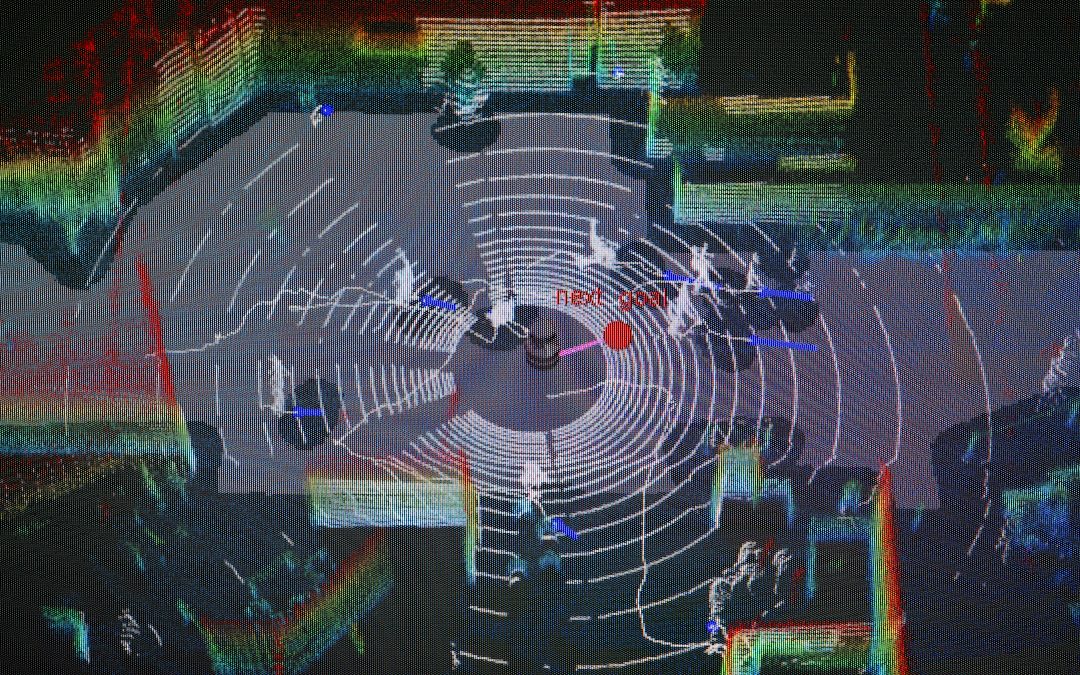
Le SLAM (Simulatenous Localization And Mapping) permet à un robot de se localiser dans l’espace et de reconstruire la carte du monde autour de lui. Des ressources permettant de la mettre en oeuvre à coût réduit sur microcontrôleur sont proposées ici afin de mettre en oeuvre cette fonction importante de la robotique.

L’odométrie, la reconstruction de trajectoire et l’asservissement en vitesse sont trois fonctionnalités importantes en robotique. Les ressources permettant de les mettre en oeuvre dans des microcontrôleurs, sont proposées ici.
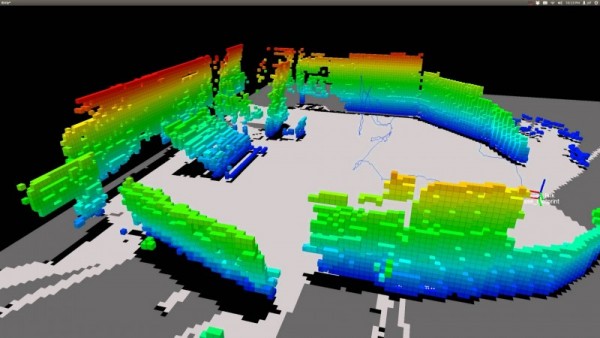
Ressources pour l’usage des télémètres laser RP-LIDAR : driver série, post-processing simples de filtrage de la carte des distances en vue de faire du SLAM
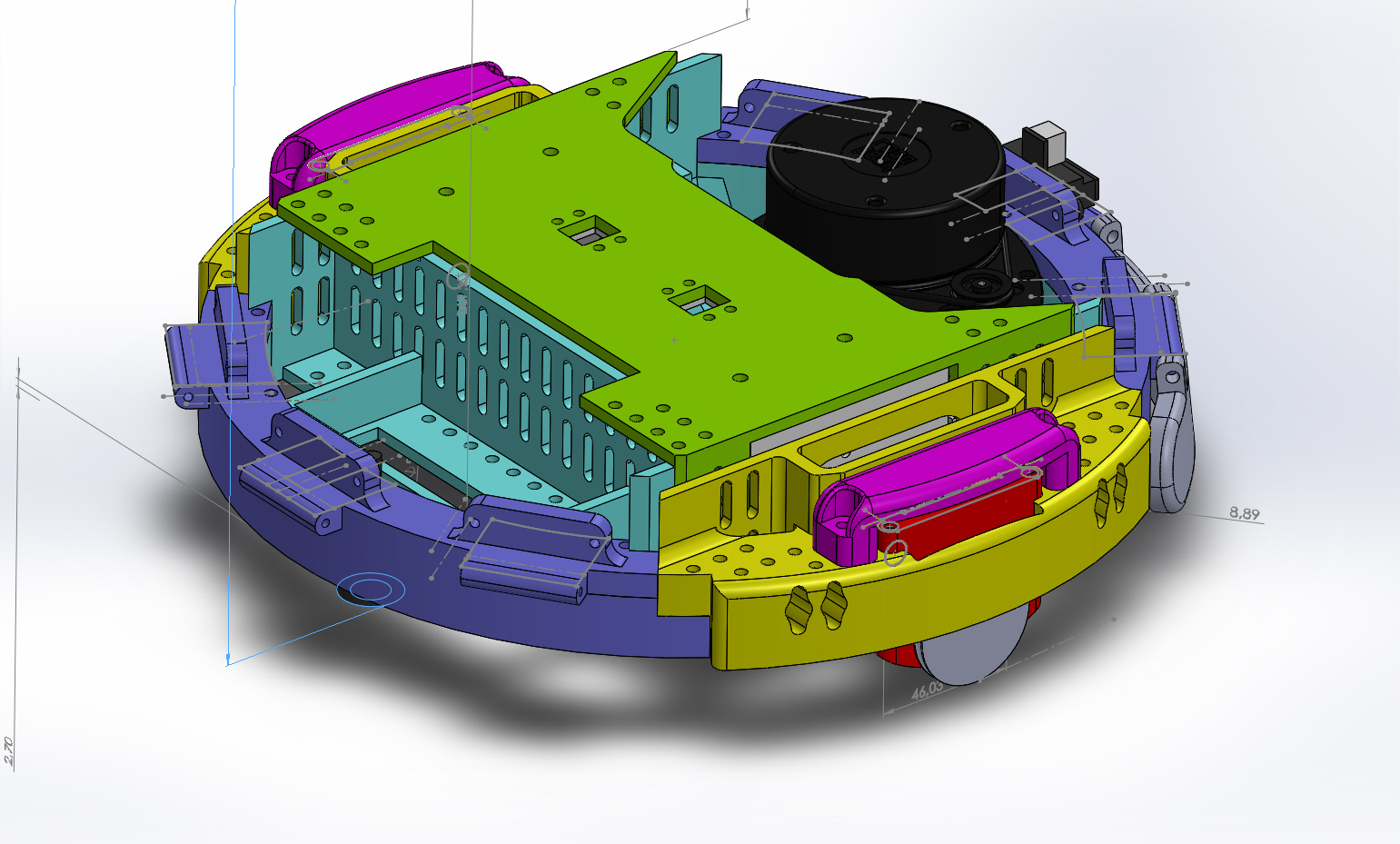
Afin d’aider les équipes à participer à la coupe de robotique des IUT, l’IUT GEII de Toulon met à disposition les fichiers .STL de ses pièces mécaniques permettant d’habiller les châssis des robots fournis par l’IUT de Cachan.
Cours de mécatronique : énergie et motricité (EME 31)
ENSTA (Ecole Nationale Supérieure de Techniques Avancées) – ParisTech