Présentations
La robotique en IUT
Comment débuter, quelles bases ?
La robotique : Mythes et réalité
Conférence de 45 minutes sur les enjeux de la robotique
Ressources pour la robotique
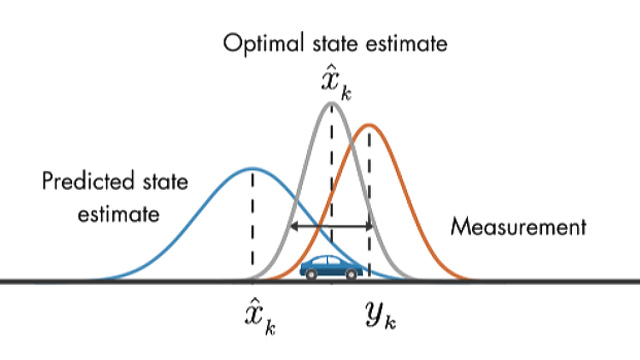
Ressources for Kalman Filtering
Tutorial videos for understanding Kalman filters
An introduction to Deep Learning
Interesting tutorial videos
Programming ressources
Robot Vision using OpenCV in C# :
a C# sample project for connecting a USB camera to a computer and using OpenCV

Trajectory planning using minimum jerk algorithm
A high frequency timer in C# :
Win32 library for using precise high frequency timers

Ressources for implementing Ethernet communication with a microcontroller and for connecting Basler Ethernet cameras to a computer

Electronics ressources
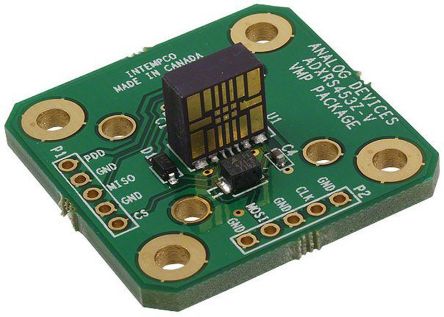
Using ADXRS453 precision gyroscope
Implementing I2C and SPI sensors
Code Examples with a PIC microcontroller
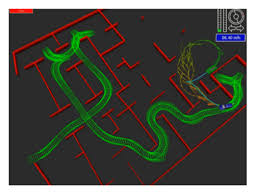
Cartographie et localisation simultanées (Simultaneous Localization And Mapping – SLAM)
Le SLAM (Simulatenous Localization And Mapping) permet à un robot de se localiser dans l’espace et de reconstruire la carte du monde autour de lui. Des ressources permettant de la mettre en oeuvre à coût réduit sur microcontrôleur sont proposées ici afin de mettre en oeuvre cette fonction importante de la robotique.
Odométrie, trajectographie et asservissement PID sur microcontrôleur
L’odométrie, la reconstruction de trajectoire et l’asservissement en vitesse sont trois fonctionnalités importantes en robotique. Les ressources permettant de les mettre en oeuvre dans des microcontrôleurs, sont proposées ici.
Ressources pour le C#
Vous trouverez ci quelques ressources utilisées pour les projets C# de pilotage et supervision de robots mobiles. Bibliothèque de création de jeux XNA : La bibliothèque pour VS2015 (mais qui fonctionne également avec VS 2013) est en téléchargement ici : XNA Game...
Ressources pour les DSPIC33
Afin de simplifier vos recherches, vous trouverez ici des documentations sur le DSPIC33 utilisé en classe en projet. Ces ressources sont classées par périphérique. Le module QEI (Quadrature Encoder Interface) : Lien vers le Reference Manual : DSPIC Ref Manual - 15 -...
Télémètre laser à balayage RP-LIDAR
Ressources pour l’usage des télémètres laser RP-LIDAR : driver série, post-processing simples de filtrage de la carte des distances en vue de faire du SLAM
Ressources pour les projets en études et réalisation de 2e année d’IUT GEII
Vous trouverez ci-dessous différentes ressources utilisées en projet d'étude et réalisation de 2e année d'IUT GEII à Toulon : Énoncé de projet en études et réalisations
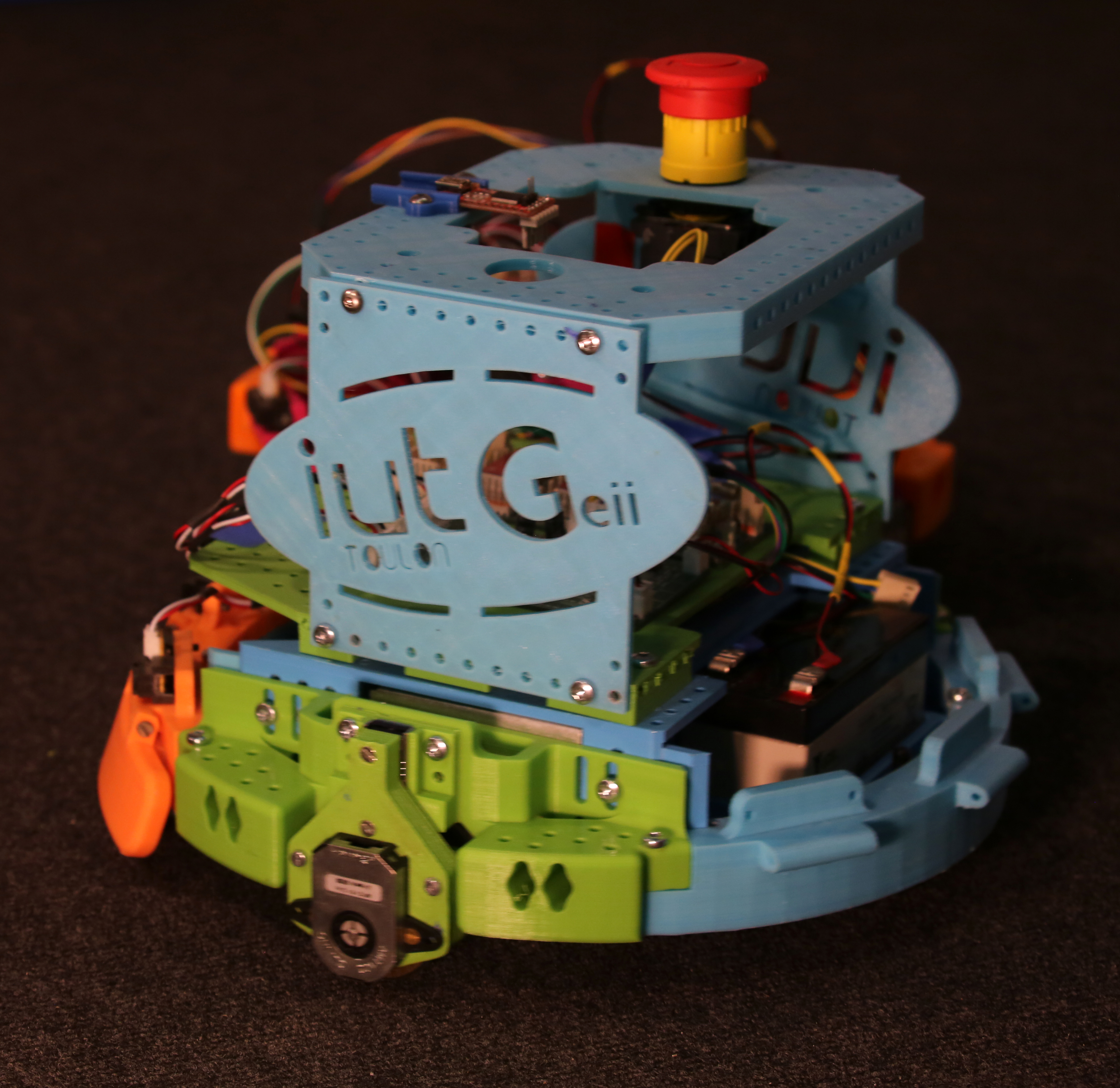
Robot IUT Bot – Base Mobile
Afin d’aider les équipes à participer à la coupe de robotique des IUT, l’IUT GEII de Toulon met à disposition les fichiers .STL de ses pièces mécaniques permettant d’habiller les châssis des robots fournis par l’IUT de Cachan.